Computer Science > PROJECT REPORT > Arizona State University CSE 579 Project Milestone 4 – Individual Project Report Automated Warehou (All)
Arizona State University CSE 579 Project Milestone 4 – Individual Project Report Automated Warehouse Scenario.
Document Content and Description Below
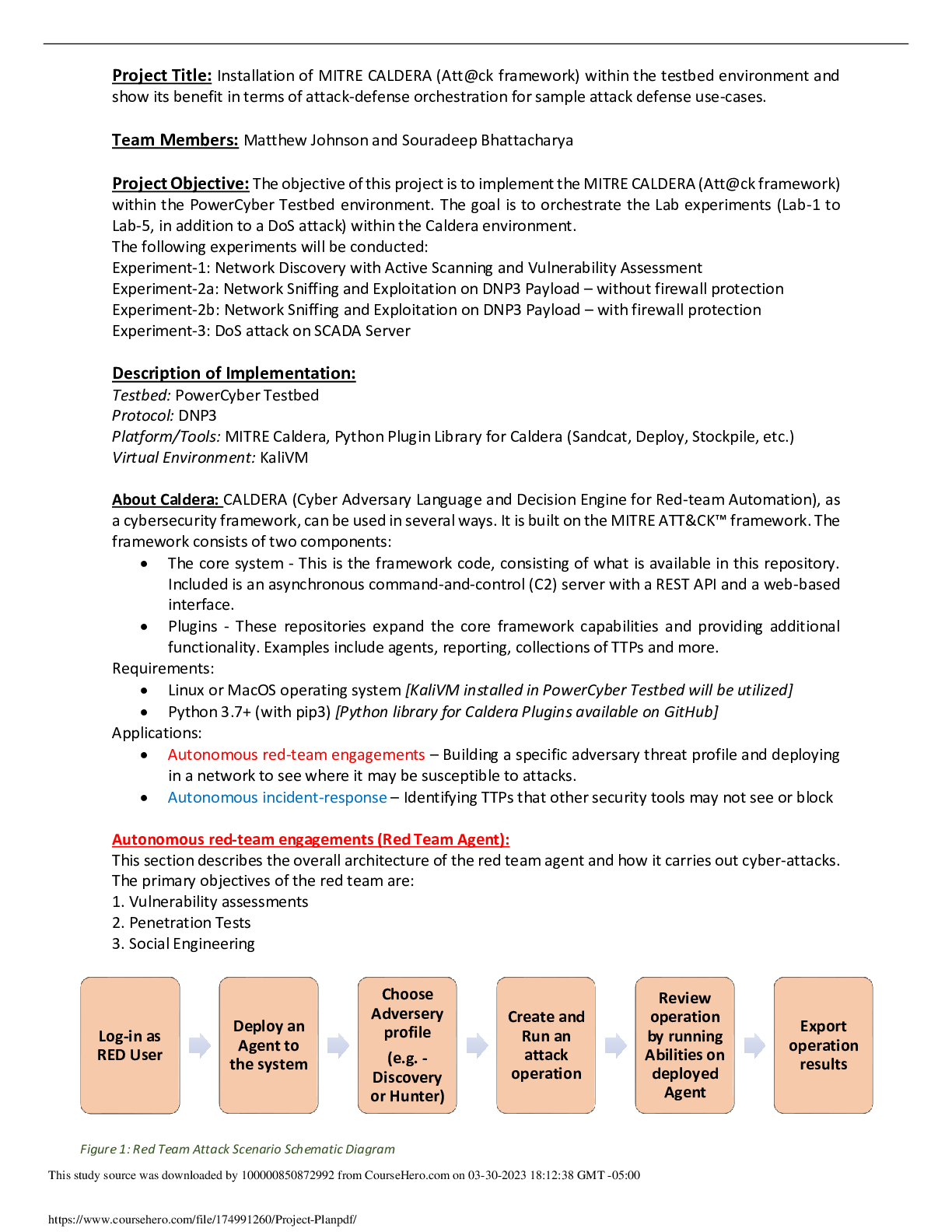
CSE 579 Project Milestone 4 – Individual Project Report Automated Warehouse Scenario Sang-Hun Sim School of Computing, Informatics, and Decision Systems Engineering [email protected] Abstract In my... individual project report, I suggested a solution to the problem of an automated warehouse. My approach involved creating a transition system affected by robots' actions, and a methodology to reach the desired state. I used Knowledge Representation and Reasoning (KRR) to define all the hard constraints for the automated warehouse, and aimed to find the minimum time for the robots to fulfill the order. I established a scenario as close to reality as possible, by adding rules and conditions based on the given input data. Each step in my approach and the analysis of the results are described. Ultimately, I found satisfactory results for all five inputs.. Problem Statement In the automated warehouse scenario, robots are tasked with delivering products to picking stations. This requires them to horizontally and vertically move through grid-shaped cells and transfer shelves containing the products to the picking stations. Robots can move beneath the shelves and pick them up due to their flat body shape. My goal was to deliver all products specified in the order state to the picking stations. I was given five instances as initial inputs, each of which had a different format in the 'init' function. The required output was the robots' actions, expressed in the 'occur' function, and rules or constraints were added to ensure the scenario was as close to reality as possible. For instance, a robot could not pass under the shelves when carrying another shelf, and had to be moved out of the way to put the shelf down. The time was counted in steps, with each step corresponding to a single action - or none at all - and there was to be no collision between robots as they moved, picked shelves up, put them down, delivered products or remained idle. The highways on the grid cells were also to remain free from shelves. These rules were outlined in the original project description, but I also added additional constraints during programming. Background I chose Automated Warehouse as my project topic, inspired by Module 5 of CSE 579. In that module, I learned about the need to reason about actions and the concept of Fluents. With Answer Set Programming (ASP) as my key tool, I was able to define each element with Atoms and express actions and their effects in a timely manner. I needed to consider the complexity of the algorithm, logical contradictions, and optimization potential while creating the necessary constraints. To gain an understanding of the project, I referred to the CSE 579 lecture notes and Vladimir’s book, Answer Set Programming. I also turned to Artificial Intelligence, A Modern Approach to learn about reasoning procedures Approaches to Solve Sketching the Program Before programming, I looked into the instance file for the types of objects and Fluents, assessing what needed to be included in the parameters. I visualized how the Automated Warehouse should look, with a 4x4 grid and Fluents at their indicated coordinates. Following the instance file, I determined the initial statuses of the Fluents, as well as the four actions the robot could make, and I made a list of required constraints that could easily be added in the code. Fluents and Objects I next dealt with the domain-independent axioms, realizing that the Fluents were not initially exogenous and thus had to be converted from the initial instance input. I declared them as instances and Fluents, defined the Atoms depicting their statuses, and incorporated object parameters, such as coordination and corresponding objects. For each object, like “node”, I had to include a unique value, like “Nid”, and applicable parameters, such as “pair(X,Y)” for location. Most of the other objects were on the same basis, but I also had to construct counting functions for the objects to define constraints and other rules. For example, information regarding the total number of nodes was essential in specifying the goal states. [Show More]
Last updated: 1 year ago
Preview 1 out of 8 pages
Reviews( 0 )
Document information
Connected school, study & course
About the document
Uploaded On
Mar 23, 2023
Number of pages
8
Written in

Additional information
This document has been written for:
Uploaded
Mar 23, 2023
Downloads
0
Views
69