Physics > Lab Report > Physics Laboratory Lab Report<New Jersey Institute Of Technology - PHYS 111ALab 9a1.> (All)
Physics Laboratory Lab Report<New Jersey Institute Of Technology - PHYS 111ALab 9a1.>
Document Content and Description Below
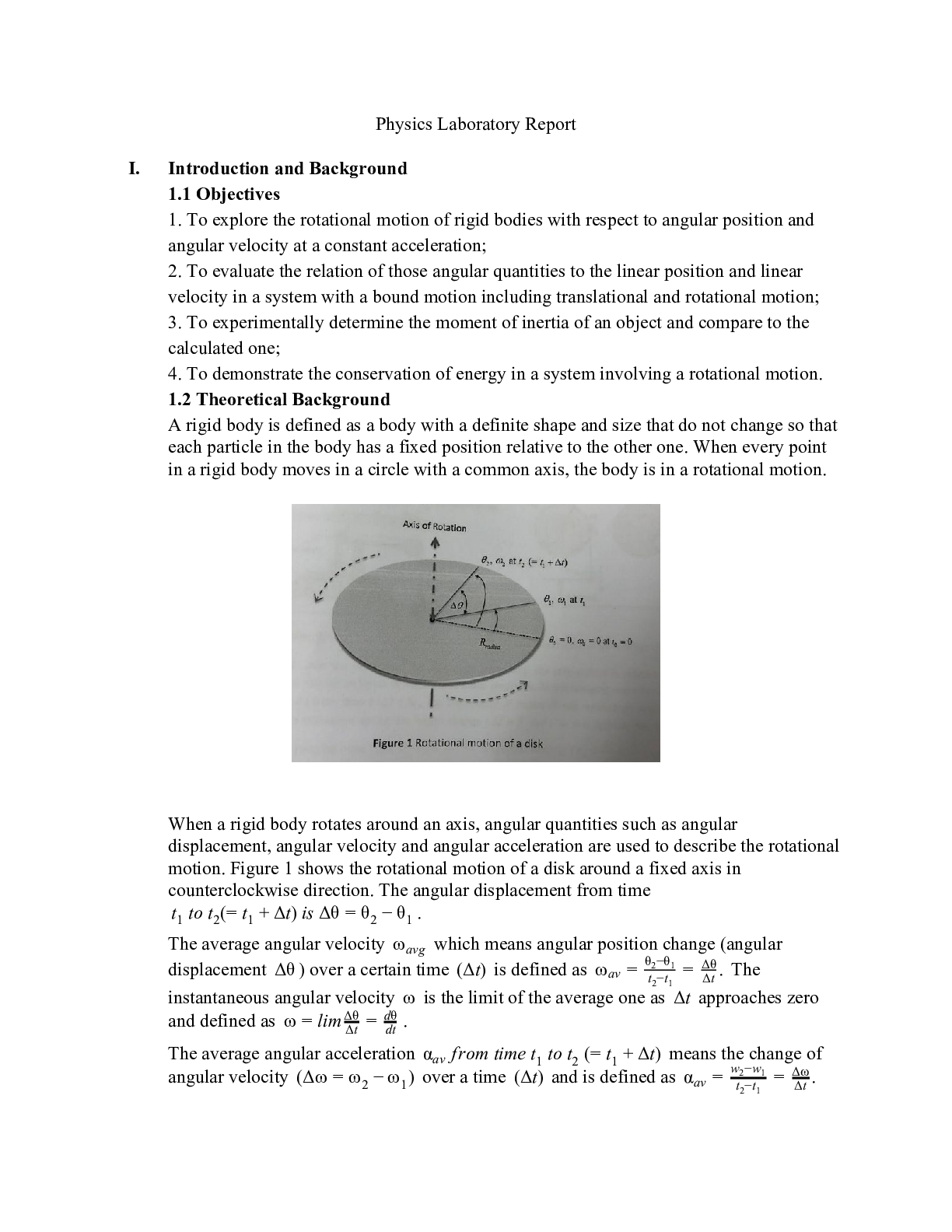
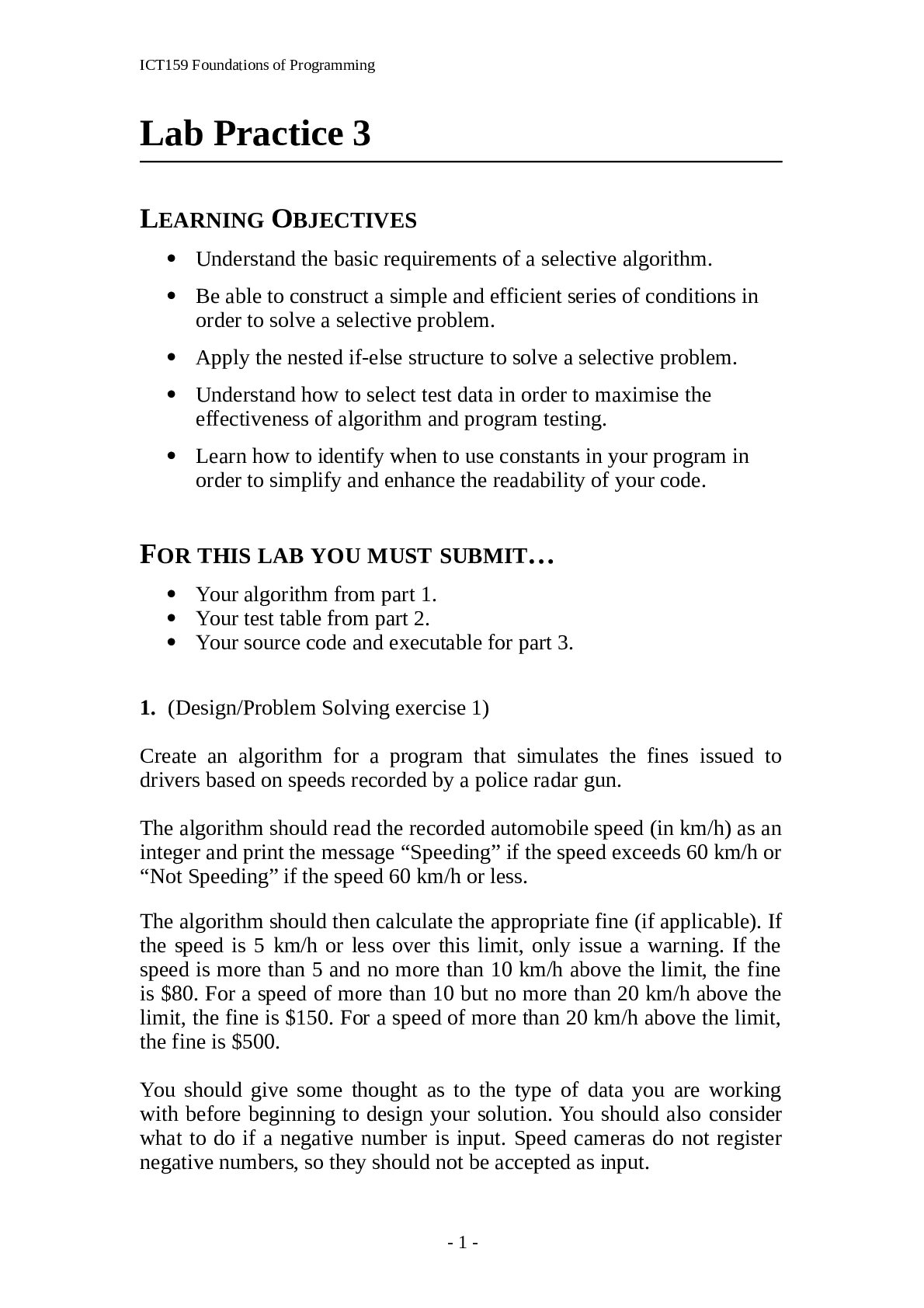
I. Introduction and Background 1.1 Objectives 1. To explore the rotational motion of rigid bodies with respect to angular position and angular velocity at a constant acceleration; 2. To evaluate t... he relation of those angular quantities to the linear position and linear velocity in a system with a bound motion including translational and rotational motion; 3. To experimentally determine the moment of inertia of an object and compare to the calculated one; 4. To demonstrate the conservation of energy in a system involving a rotational motion. 1.2 Theoretical Background A rigid body is defined as a body with a definite shape and size that do not change so that each particle in the body has a fixed position relative to the other one. When every point in a rigid body moves in a circle with a common axis, the body is in a rotational motion. When a rigid body rotates around an axis, angular quantities such as angular displacement, angular velocity and angular acceleration are used to describe the rotational motion. Figure 1 shows the rotational motion of a disk around a fixed axis in counterclockwise direction. The angular displacement from time t1 to t2(= t1 + Δt) is Δθ = θ2 − θ1 . The average angular velocity ωavg which means angular position change (angular displacement Δθ ) over a certain time (Δt) is defined as ωav = t −t . The 2 1 θ −θ 2 1 = Δt Δθ instantaneous angular velocity ω is the limit of the average one as Δt approaches zero and defined as ω = lim . Δt Δθ = dt dθ The average angular acceleration αav from time t1 to t2 (= t1 + Δt) means the change of angular velocity (Δω = ω2 − ω1) over a time (Δt) and is defined as αav = t −t . 2 1 w2−w1 = Δt ΔωThe instantaneous angular acceleration is the limit of the average one as Δt approaches zero and defined as α = lim . Δt Δω = dt dω in this lab, you will explore rotational dynamics of a system with a bound motion as shown in Figure 2 (A). This system basically consists of two bodies: one is the rigid body (a hanging mass) in translational motion and the other is in rotational motion (a rotating platform, a step-pulley and a shaft). The hanging mass is tied to a light string wound around the outer rim of the step-pulley of radius R. The rotational motion of a rigid body is bound to the vertical linear motion of the other. Figure 2 (B) illustrates how the rotation of the rigid body (especially, the step-pulley) is related to the linear motion of the hanging mass m in terms of angular and linear positions. As the hanging mass has moved down a vertical position (h) from time t to t + t the step-pulley of radius R has rotated an angle (Δθ) from point a to a'which is equivalent to the arc length change Δs = RΔθ . In this system, the linear velocity (vm = ΔΔht = ddht ) of the hanging mass must be same as the tangential velocity (va = ΔΔst = ddst ) of the point a which is equivalent to the radius R times the angular velocity (ω = ΔΔθt = ddθt ) of the step-pulley. This is summarized as vm = va = Rω . Similarly, the acceleration (a) of the hanging mass is equal to the tangential acceleration ( aa ) of the point a at the rim of the step-pulley, which is equivalent to the radius R times the angular acceleration ( α ) of the step-pulley: am(= ddvtm ) = aa(= ddvta ) = Rα(= ddωt ) . Figure 3 illustrates the summary of this relation depending on the radius of a step-pulley where the string is wound. In case 1, the string is connected to the small pulley of radius r and in case 2, it is connected to the lar [Show More]
Last updated: 1 year ago
Preview 1 out of 14 pages
Reviews( 0 )
Document information
Connected school, study & course
About the document
Uploaded On
Apr 16, 2021
Number of pages
14
Written in

Additional information
This document has been written for:
Uploaded
Apr 16, 2021
Downloads
0
Views
73
.png)
 (1).png)

.png)
